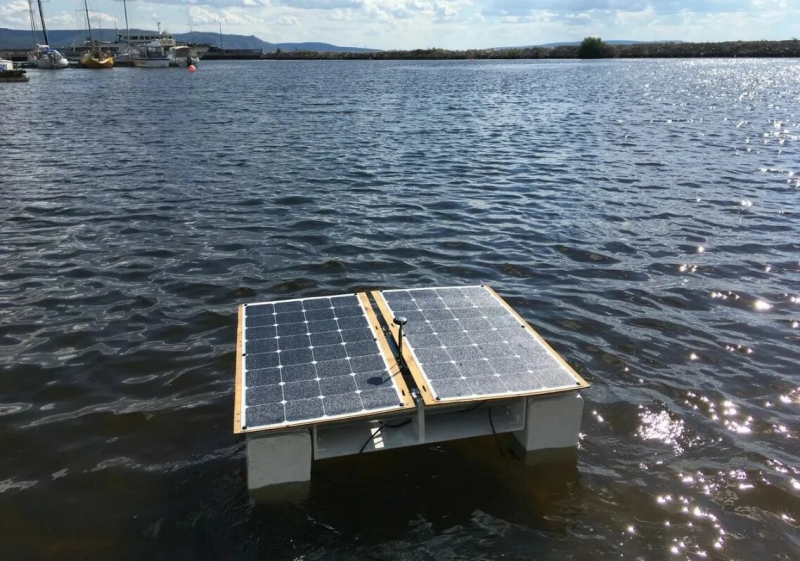
Дрон необходимо было сделать компактным, чтобы его можно было легко перевозить на машине, спускать с необорудованных берегов. Однако компактность не должна была стать причиной снижения автономности и функциональности, поэтому в качестве материала корпуса было выбрано легкое и прочное стекловолокно, а питание обеспечивалось в том числе с помощью солнечных батарей. Для защиты электроники были добавлены три герметичных кейса на быстросъемных крепежах и герметичный люк на палубе, что позволяет удобно менять и обслуживать электронику.
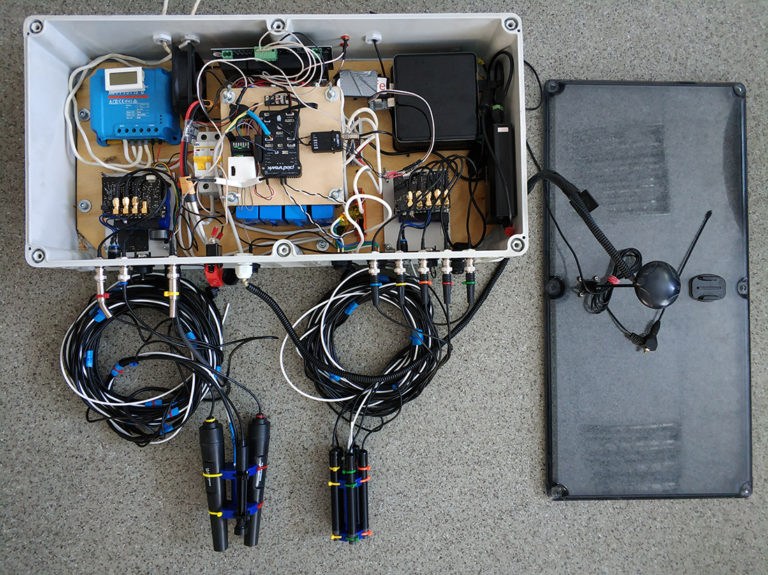
Для авторизованного доступа к датчикам дрона был разработан протокол их идентификации с помощью уникальной цифровой подписи. Также был создан программный пакет sensors-connectivity, который позволяет агрегировать информацию от датчиков. Публикацию данных можно выполнять в удаленное место в сети: например, в одном из экспериментов данные отправлялись на сервера всемирной сети Sensor.Community. При этом опубликованные данные защищены от подделок с помощью комбинации различных инструментов, использующих технологию блокчейн.
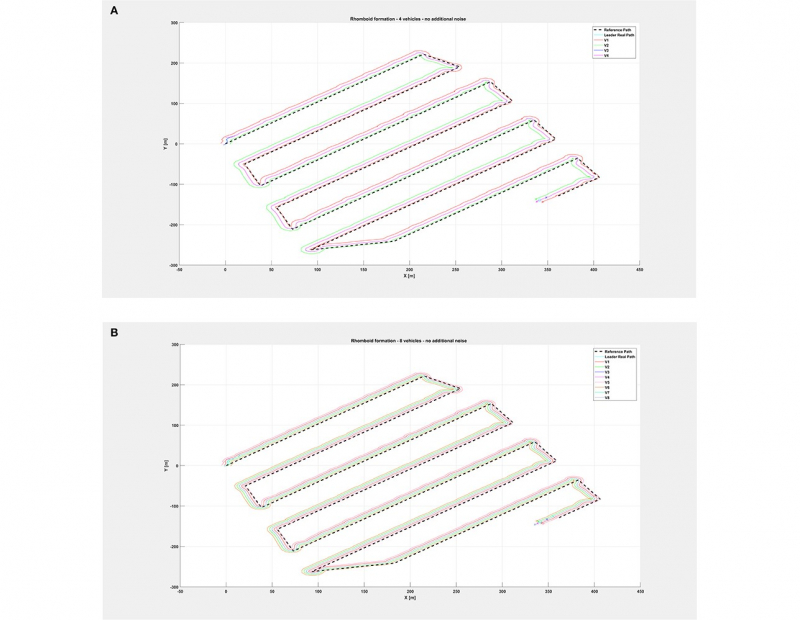
Работа имела не только инженерный выход, но и научный. Весной команда проекта совместно с коллегами из Италии опубликовала статью в журнале Frontiers in Robotics and AI. В ней, помимо результатов использования первого прототипа, были представлены наработки по планированию траектории для «роя» водных дронов, которые направляются дроном-лидером.